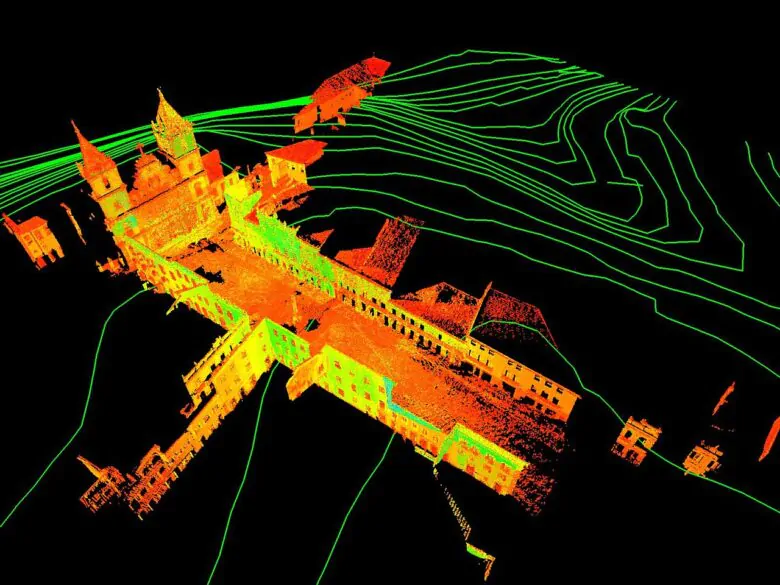
É um equipamento que “varre” o ambiente com laser, medindo milhões de pontos por segundo. Com isso, cria uma nuvem de pontos 3D muito detalhada do terreno, da obra ou do prédio.
Base técnica:
Laser scanning (TLS/MLS/ALS) mede distância + ângulos por time-of-flight ou phase-shift, gerando XYZ (e intensidade). Pode incluir cor (câmera acoplada) e trajetória (IMU/SLAM). Resulta em point cloud densa (LAS/LAZ/E57) para modelagem/medição.
Base técnica:
Cadastro geométrico de alta densidade para modelagem, volumetria, compatibilização de projetos, BIM/IFC, análises estruturais, backcheck de execução, planejamento de intervenções.
Base técnica:
Joga um laser, mede o tempo de volta, calcula a distância e junta com o ângulo de onde mirou.
Base técnica:
Mais perto e com resolução alta = mais detalhe. Superfícies escuras/vidro atrapalham.
Base técnica:
Precisão típica TLS: mm a poucos mm a curta distância; alcance 50–300 m (modelo-dependente). Densidade depende de passo angular, tempo de varredura e incidência. Em MLS/ALS, a acurácia é limitada por trajetória (GNSS/IMU) e GCPs.
Defina o que precisa medir, quanto detalhe quer e por onde vai escancear.
Base técnica:
Coloque o tripé firme, escaneie em vários pontos, use alvos/esferas para juntar tudo.
Base técnica:
Caminhe/dirija com o scanner ligado; feche voltas para o sistema se ajustar. No drone, voe faixas com sobreposição.
Base técnica:
Junte todos os escaneios num mesmo sistema, e amarre ao mapa oficial (SIRGAS2000).
Base técnica:
Pode ter foto nas cores reais e um valor de brilho do laser (ajuda a diferenciar materiais).
Base técnica:
Colorização por câmera calibrada (boresight/offset); intensidade depende de alcance, ângulo e albedo. Útil para classificação e detecção de materiais/superfícies.
Tirar ruído, juntar trechos, diminuir pontos se precisar e modelar superfícies.
Base técnica:
Base técnica:
Use RTK e estação total para amarrar e checar a nuvem.
Base técnica:
Rede de apoio e checagem (GNSS/TS) reduz distorções de registro e dá absoluto confiável. Breaklines levantadas com estação refinam MDT (hidro-coerente).
Scanner ajuda a explicar e medir; para cartório, ainda precisa de planta/memorial padrão.
Base técnica:
Para atos registrais, seguir normas de levantamento (planta/memorial). A nuvem dá detalhe para as built, volumetria, compatibilização, e controle de deformações (comparar épocas).
Chuva, neblina e pó atrapalham; vidro e superfícies pretas dão erro; precisa linha de visão.
Base técnica:
Atenuar oclusões com múltiplos setups; evitar grandes ângulos de incidência; controlar exposição (colorização), temperatura e vibração (MLS). Cuidado com privacidade (imagens) e segurança no canteiro.
Base técnica:
Compare com pontos medidos no chão; se bater, está ok.
Base técnica:
Base técnica:
Escopo/LOD → plano de setup/rota → TLS/MLS/ALS com redundância → registro (targets/ICP/SLAM) → georreferência (GNSS/TS) → limpeza/classificação/MDT-mesh → QA/QC → entregas LAS/E57 + CAD/BIM + PDF.
Base técnica:
Geometrias de targets ruins, ICP sem sobreposição, sem GCPs, SR errado, datum/geóide ausentes, densidade insuficiente em áreas críticas, sem breaklines no MDT.
Cobertura completa + registro bem feito + amarração ao SIRGAS2000 = nuvem precisa e útil.
Base técnica:
Parâmetros coerentes (resolução/alcance), redundância (targets/loops), controle (GNSS/TS), QA/QC documentado e entregas padronizadas (LAS/E57 + CAD/BIM + PDF).